Pedestrian Dead-Reckoning System
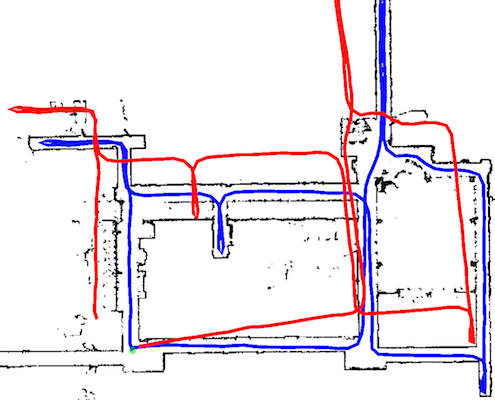
The goal of the Pedestrian Dead-Reckoning (PDR) project was to track the position of a human subject in real-time. The PDR system uses a foot-mounted Inertial Measurement Unit (IMU), which includes a three-axis gyroscope, a three-axis accelerometer, and a three-axis magnetometer. The IMU is strapped to the side or embedded in the heel of the user’s boot. The side-mounted IMU can be transferred easily between different users while the in-heel version better protects the IMU from damage and cannot be dislocated easily. The PDR system’s computations are performed on a portable computer that is located inside a belt pack, together with batteries and support electronics.
The system derives user’s position by integrating measurements from the IMU. By solely rely on IMU data, the system is self contained and does not require any prior setup. However, the measurement error is also integrated and thus makes the position error unbounded. We implemented several techniques to bound the error and improve position estimation.

Related publications
Maximum Likelihood Tracking of a Personal Dead-Reckoning System
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015
FILTERING AND TRACKING FOR A PEDESTRIAN DEAD-RECKONING SYSTEM
Ph.D. Thesis, University of Michigan, 2015

Magnetometer-enhanced personal locator for tunnels and GPS-denied outdoor environments
Proceedings of the SPIE Defense, Security + Sensing; Unmanned Systems Technology XIII, International Society for Optics and Photonics, Orlando, FL, 2011

Personal Dead-Reckoning System for GPS-denied Outdoor Environments
Technical Report

